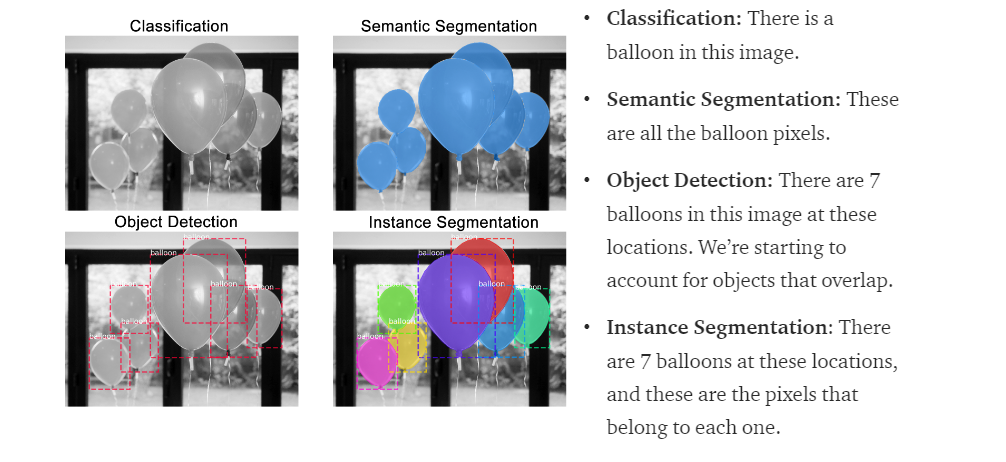
mask_rcnn中ballon的例子
classsification VS semantic segmention VS object detection VS instance segmention
想要打开其他盘符的文件无法实现,如D、E、F盘目录下的文件。现有解决办法如下,无需修改Jupyter Notebook的默认打开路径。
win + R 进入CMD模式,在cmd窗口中输入下面代码即可打开 E盘下的OpenTry文件夹
-
- cd /d E:\OpenTry
- jupyter notebook
BDD100k——info:
accerator(其中,x,y,z是各个方向的加速度)
locations(timestamp:时间戳;longitude:经度 course:轨道、航线 latitude:纬度)
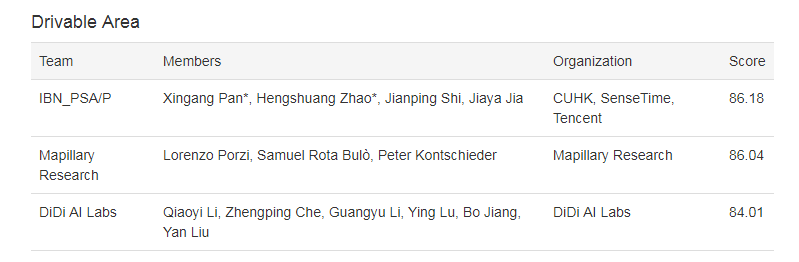

由上图可知在; 当drivable map的训练数据有两部分组成,一个是images,一个是drivable maps的掩膜图
balloon是将polygon的坐标送到load_mask中,将点的位置掩膜值置为1
ballon提供根据mask直接产生bounding box坐标,可以考虑bdd drivable map的坐标由这个变换来
Ctrl + Shift + P jupyter notebook下拉快捷键菜单
y一个讲解的jupyter notebook特别好的链接: https://juejin.im/post/5af8d3776fb9a07ab7744dd0
参考:
https://engineering.matterport.com/splash-of-color-instance-segmentation-with-mask-r-cnn-and-tensorflow-7c761e238b46